
4. LTIシステム
LTI(Linear Time-Invariant)システムとは、線形時不変システムの略称で、線形性と時不変性を満たすシステムを指し、以下の特徴を持つ。
・線形性(Linearity):入力信号の線形結合が、出力信号においても同様に線形であるという性質を指す。
・時不変性(Time-Invariance):システムの特性が時間に依存しないという意味である。システムの応答は、時間が経過しても変わらない。例えば、同じ入力信号を異なる時間に与えても、対応する出力信号は同じであるという性質である。
・因果性(Causality):出力が対応する入力が発生した後のみ影響を受け、未来の入力は現在の出力に影響を与えないという性質である。
・線形時不変微分方程式の表現:LTIシステムは通常、線形時不変微分方程式でモデル化される。この方程式は、入力信号とその導関数(時間に関する微分)を用いて、出力信号を表現する。
LTIシステムはこれらの特性によって定義され、これらの特性によってシステムの解析や設計が分かりやすくなる。LTIシステム理論は、信号処理、通信、制御工学などの多くの応用分野で活用されている。
線形システム
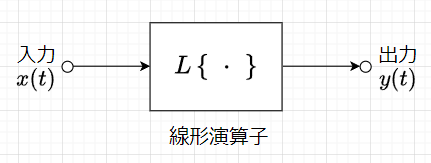
システムが線形のとき、図1に示すように線形演算子Lを用いて式(1)のように表す。L\left\{x(t)\right\} = y(t) \; \cdots (1)
線形システムは、重ね合わせの理(重畳の理)によって定義される。入力x_1(t) , \; x_2(t)の出力をy_1(t), \; y_2(t)とすると任意の定数a, \; bに対して、L\left\{a x_1(t) + b x_2(t)\right\} = L \left\{a x_1(t)\right\} + L \left\{b x_2(t)\right\} = a y_1(t) + b y_2(t)が成り立つとき、このシステムを線形システムという。
入力x(t)に対する出力y(t)のシステムに入力x(t - t_0)を加えたとき、L\left\{x(t - t_0)\right\} = y(t - t_0)の関係が成立するシステムを時不変という。線形性と時不変性をあわせもったシステムを線形時不変(LTI)システムという。
線形システムに単位インパルス\delta(t)を入力として加えたときの応答(単位インパルス応答)をh(t)とすると、線形システムが時不変とすると、L \left\{ \delta (t - t_0) \right\} = h(t - t_0)が成り立つ。
有限な入力x(t)に対して、出力y(t)が有限であるとき、そのシステムは安定であるという。LTIシステムの安定条件として、時間領域において、インパルス応答h(t) が時間とともに 0 に収束 するならば、そのシステムは 安定 であり、h(t) が発散や振動し続けるならば、そのシステムは 不安定 である。システムが安定であれば、インパルス応答h(t)に対する条件として、\int_{-\infty}^{\infty} |h(t)|dt < \inftyが成り立つ。
システムに入力が印可される前には出力が現れないこと、すなわち、t<0で、入力x(t)=0であれば、その出力もy(t)=0となるとき、そのシステムは因果性を有しているという。また、因果システムのインパルス応答は、h(t)=0, \;\;\; t<0を満たす。
畳み込み積分
単位インパルス関数\delta(t)は、\delta(t)=\begin{cases} \infty \enspace (t=0) \\ 0 \enspace \enspace (t \neq 0)\end{cases} \\ \int_{-\infty}^{\infty} \delta(t) dt =1 と定義される 。これを使うと\int_{-\infty}^{\infty}\delta(t)x(t)dt = x(0) \;\;\;\;\;\;\; \int_{-\infty}^{\infty} \delta(t - t_0)x(t)dt = x(t_0)となる。これは、信号x(t)からt=0の値x(0)や、t=t_0の値x(t_0)を取り出す働きとなっている。
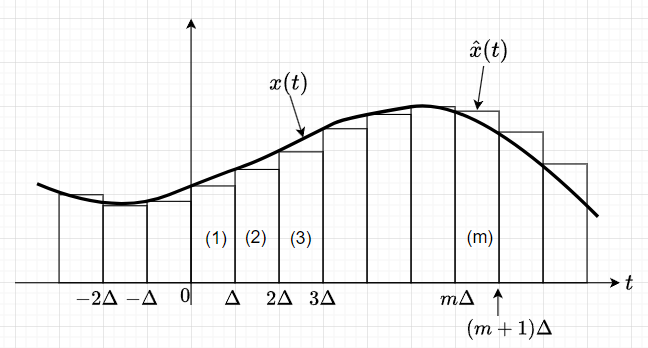
図2に連続時間信号x(t)を階段状波形\hat{x}(t)で近似するイメージを示す。\delta_{\Delta}(t) = \begin{cases} \frac{1}{\Delta} , \enspace 0 \leq t < \Delta \\0, \enspace その他 \end{cases}を定義すると、\Delta \cdot \delta_{\Delta}(t)は単位1の面積なので、図2における(1)は、x(0) \cdot \delta_{\Delta}(t) \cdot \Deltaと表せるが、\Delta \cdot \delta_{\Delta}(t)=1なので、x(0)となる。同様に(2)は、x(\Delta) \cdot \delta_{\Delta}(t - \Delta) \cdot \Delta = x(\Delta)であり、(m)は、x(m\Delta) \cdot \delta_{\Delta}(t - m\Delta) \cdot \Delta = x(m\Delta)となる。従って、\hat{x}(t) = \sum_{k=-\infty}^{\infty} x(k \Delta)\cdot \delta_{\Delta}(t - k \Delta) \cdot \Delta \;\cdots \cdots (2)と表せる。\Delta \rightarrow 0で式(2)の左辺は、x(t)となる。また、右辺の\delta_{\Delta}(t)は、\delta_{\Delta}(t) \rightarrow \delta(t)となり、総和は積分に換えられるので、x(t) = \int_{-\infty}^{\infty} x(\tau)\delta(t - \tau) d\tauとなる。(厳密性を無視して表現すると、x(t)は、\hat{x}(t)で\Delta \rightarrow 0としたインパルス列の集合で表せるということ。)
LTIシステムへ信号x(t)を印可したときの出力y(t)を考える。まず、\hat{x}(t)の微小パルス入力に対する応答出力を求め、それらの総和から\hat{y}(t)を求める。システムの時不変性から入力\delta_{\Delta}( t - k \Delta)に対する応答として、h_{\Delta}( t - k \Delta)を定義すると、線形性から重ね合わせの理により、出力y(t)は、y(t) = \lim_{\Delta \rightarrow 0} \sum_{k=-\infty}^{\infty} x(k \Delta) \cdot h_{\Delta}( t - k \Delta) \cdot \Deltaと表せる。\Delta \rightarrow 0の極限で\delta_{\Delta}(t - k \Delta) \rightarrow \delta(t- \tau) となり、h_{\Delta}( t - k\Delta) は、h_{\Delta}( t - k\Delta) \rightarrow h(t - \tau)のように単位インパルス応答となる。従って、右辺の総和は積分に置き換わり、y(t) = \int_{-\infty}^{\infty} x(\tau) h(t - \tau) d\tau \; \cdots (3)が得られる。これを畳み込み積分という。
インパルス応答h(t)のLTIシステムに入力x(t)を印可したときの出力y(t)は、式(3)の畳み込み積分で与えられるが、これをy(t) = x(t) \ast h(t)と表記する。

“4. LTIシステム” に対して1件のコメントがあります。
コメントは受け付けていません。