
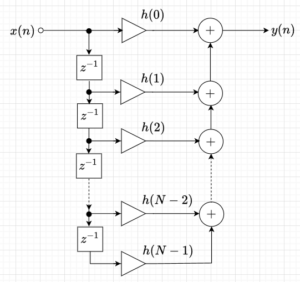
12. FIRディジタルフィルタ
ディジタルフィルタの構成 ディジタル信号処理の分野で、ディジタルフィルタは基本的で重要な技術で、様々な領域で活用されている。ディジタルフィルタは、特定周波数範囲の信号の伝送や除去などアナログフィルタと同じ目的で使用される […]
24. 極配置法(演習)
式(1)で表記する1入力\(n\)次元定係数線形システムを制御対象とする。$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = c x(t) \;\;\cdots \cdots (1)$$式( […]
23. 可観測性(演習)
※可観測性の解説は、11. 可観測性 、9. 対角正準形 を参照願います。 システムを$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = cx(t) \;\; \cdots \cdots ( […]
22. 可制御性(演習)
※可制御性の解説は、10. 可制御性、12. 可制御正準系 を参照願います。※固有値、固有ベクトルの計算手順の詳細については、固有値と固有ベクトルの計算 を参照願います。 座標変換 1入力1出力\(n\)次元システム $ […]
21. システムの応答(演習)
制御対象を入力\(m\)、出力\(l\)の\(n\)次元の線形定係数システムとする。$$\dot{x}(t) = A x(t) + B u(t) \;\cdots \cdots (1) \\ y(t) = C x(t)\ […]
20. システムの状態方程式(演習)
システムの特性を以下の状態方程式(式(1))、出力方程式(式(2))で表現する。$$\dot{x}(t) = A x(t) + B u(t) \;\;\cdots \cdots (1)\\y(t) = C x(t) \; […]
20. 抵抗・インピーダンスの測定(2)
インピーダンスを精度よく測定するために重要な要素は、測定条件の最適化である。インピーダンス測定器(LCRメータやインピーダンスアナライザなど)を使用する際に必要となる基本的な設定条件をまとめる。 (1) 周波数:最も基本 […]