
5. 積分(微積分学)
積分の定義は、微分の逆演算と関数のグラフをヒストグラムの極限と見た時の面積という2つの面がある。※微小量、微分の記法などについては、 4. 微分(微積分学)を参照願います。 微分の逆演算としての積分 \(F(x)\)の導 […]
4. 微分(微積分学)
微分法 ニュートンは、瞬間における速度や加速度を定義するために微分の概念を導入した。時間の関数をグラフに描いたとき、その曲線への接線の勾配を微分係数という。ライプニッツは、独立変数の微小変化に対する関数の変化の比率を考え […]
3. 初等関数(微積分学)
初等関数(elementary function)とは、数学において基本的でよく知られた関数の総称で、以下のような関数が初等関数として挙げられる。1.多項式関数(代数関数)(例:\( f(x) = x^2 + 3x + […]
26. 積分型最適レギュレータ
目標値がステップ関数であるサーボシステムの構成として、積分型最適レギュレータがある。これは、入力\(u(t)\) はできるだけ緩やかに変化させながら制御対象の出力\(y(t)\) と一定目標値\(r(t)\) との偏差\ […]
25. 最適レギュレータ
現代制御理論における最適レギュレータは、制御対象の状態を評価関数と呼ばれる指標に基づいて最適な状態に導く制御システムで、状態フィードバックを用いて制御し、評価関数の最小値となるようなフィードバックゲインを決定することで実 […]
17. 離散時間系の最適レギュレータ
最適レギュレータは、制御理論において、システムの状態を効率的に制御するためのフィードバック制御法である。システムの性能指標(評価関数)を最小化しつつ、システムの安定性や性能を最適化することを目的とする。 最適レギュレータ […]
14-1. 状態観測器(演習)
可制御、可観測の双対性 可制御性と可観測性の双対性とは、これらの2つの性質が密接な関係を持っていることを意味し、システムの可制御性に関する問題を、対応する「双対」システムにおける可観測性の問題に置き換えて考えることができ […]
12-1. 状態フィードバック制御(演習)
離散時間システムの状態フィードバック制御 離散時間システムが、$$x(k+1) = \begin{bmatrix} 0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0. […]
9-1. 可制御性、可観測性(演習)
離散時間システムの可制御、可観測条件 連続時間システムの状態方程式が、$$\frac{dx}{dt} = \begin{bmatrix} 0 & 1 \\ -1 & 0 \end{bmatrix} x + […]
8-1. 離散時間システムの安定性(演習)
離散時間システムの安定性の基準 離散時間システムの特性方程式のすべての根(固有値、伝達関数の極)が単位円の内側に存在する場合、そのシステムは安定である。特性方程式の形は次のように表される。$$\phi(z) = a_0 […]
7-1. 離散時間システムの定常特性(演習)
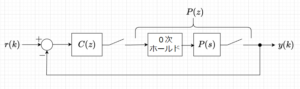
$$P(s) = \frac{1}{s+1}$$の1次系とする。*図1において、0次ホールドを使用して離散化した\(P(s)\)を求める。$$P(z) = (1 - z^{-1})\mathcal{Z} \left\{\ […]
5-1. 離散時間システムの応答(演習)
離散時間システムのインパルス応答 離散時間伝達関数が、$$G(z) = \frac{z + 0.3}{z^2 - 0.7z +0.1}$$のシステムのインパルス応答を求める。 解法1:$$G(z) = \frac{Y(z […]
4-1. 連続時間システムの離散化(演習)
連続時間伝達関数の離散時間伝達関数への変換 (1)\(G(s) = \frac{K}{s}\)を0次ホールドを含む離散化システムに変換する。$$G(z) = (1 - z^{-1})\mathcal{Z}\left\{\ […]
2-1. 留数定理によるZ変換
※以下、虚数単位に「\(j\)」を使用する。 留数定理 留数定理は、特異点の周りで関数を積分する際に、その点における関数の「留数」(Residue:何かが取り除かれた後に残っているもの、という意味)を利用するものである。 […]
1-1. 離散時間制御系の構成(演習)
連続時間システムから離散時間システムへの変換 連続時間システムが微分方程式$$\frac{dy}{dt} = \alpha y + \beta u \;\; \cdots (1)$$で与えられるとき、このシステムをディジ […]
2. 行列式(線形代数)
行列式とは、正方行列に対して定義される量で、歴史的には行列が表す一次方程式の可解性を判定する指標として導入された。幾何的には、線型変換に対して線形空間の拡大率ということができる。つまり、行列式は、行列がどれくらい空間を「 […]
1. 行列と行列の演算(線形代数)
線形代数は、ベクトル空間と線形写像に関する理論と応用を扱う。制御工学、特に現代制御理論では重要な数学ツールとなっている。線形代数は、次の概念や操作を含む。1.ベクトルとベクトル空間:ベクトルは数値の集合であり、方向と大き […]
24. 極配置法(演習)
式(1)で表記する1入力\(n\)次元定係数線形システムを制御対象とする。$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = c x(t) \;\;\cdots \cdots (1)$$式( […]
23. 可観測性(演習)
※可観測性の解説は、11. 可観測性 、9. 対角正準形 を参照願います。 システムを$$\dot{x}(t) = A x(t) + b u(t) \\ y(t) = cx(t) \;\; \cdots \cdots ( […]
22. 可制御性(演習)
※可制御性の解説は、10. 可制御性、12. 可制御正準系 を参照願います。※固有値、固有ベクトルの計算手順の詳細については、固有値と固有ベクトルの計算 を参照願います。 座標変換 1入力1出力\(n\)次元システム $ […]